If its not chinese cheap offbrand, why cant they spend money on GOOD translation services?
Because Americans can barely speak proper English, not to mention write it?
If its not chinese cheap offbrand, why cant they spend money on GOOD translation services?
Because Americans can barely speak proper English, not to mention write it?
It's in a rig in this vid
https://youtu.be/0IMZCzZC8vs
Hi Everyone!
I've been away from the forums for far to long...... but, if anyone has Hobbywing Q's, you can hit me up directly, Charlie@hobbywing.com, or through the contacts on HobbywingDirect.com just put "Charlie" in the subject line and it'll get directly to me!")
I've driven this system for several months now, in many different conditions and loads. Now, clearly I'm super biased, that's not something I ever try to hide or mask, but, this system is amazing. Doesn't get super hot at all, does the "Lug by Lug" crawling, and has super fine ultra smooth response. All developed by Hobbywing in house.
You can discuss or poke at the tech till you turn blue in the face, but the simple fact is, this thing drives amazing. When handed off to folks, they often did not know it was brushless, and asked me "What turn is this setup". When I explained, they needed to pull the body off for proof..... LOL.
Point being if you guys have Q's about this for us, please send them my way, and I'll run it up the chain and get some official clarifications.
This system is a full closed loop system, and the RPM of the motor is directly tied to throttle position. A normal setup basically outputs a motor signal, the motor response, and we adjust throttle input to match loads on the motor. The new system, will stay at what ever RPM you put it at, regardless of the loads on it. Uphill, or down hill. The down hill driving is amazing.
So, I have a few vids of this system up now, and am currently working on a new run through of how "slow" this motor can go.
Brought it out to Proline By the Fire, let folks wheel my own truck, and borrow a system, the responses extremely positive. Long time "Brushed only" drivers, were extremely impressed.
Ya'll know me, I'm no expert super engineering guy, but I love RC, and I do it all the time. Feel free to email me anytime. I won't be able to stay on top of the Forum stuff, but I'm at my desk often and can always answer an email!
We've got samples out to testers now, and flood gates of "Real" information will start to flow soon!
Thank you!
Charlie@hobbywing.com (Formerly Charlie the Novak guy..... LOL. )
PS: you can check out my Youtube Channel for Hobbywing, "Hobbywing Official", and Check out "The Charlie Show" playlist. I think forums don't like links, so to avoid any post distress... lol, gonna leave the direct links out. It comes up right away with those search terms.
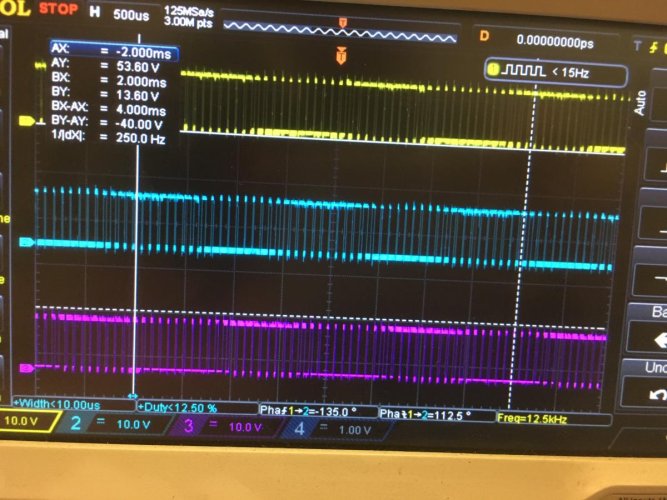
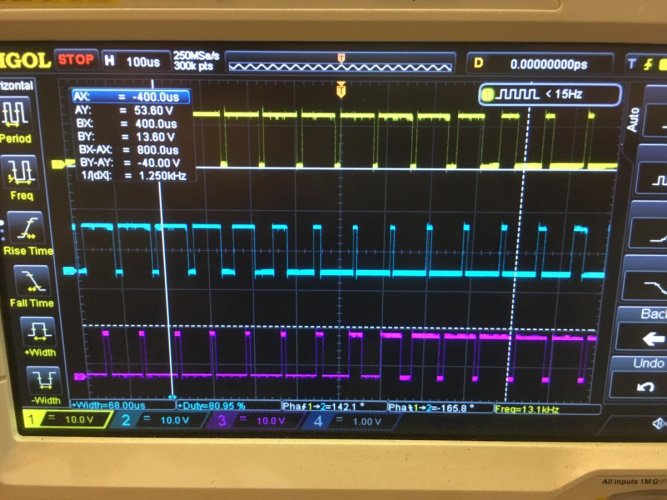
O scope output. Notice the sharp transitions from low duty to high duty on each phase. Or not, maybe you don’t look at these things as much as I do, lol!
A little more zoomed in. Each phase rides at peak duty a looooong time per commutation cycle. There is a little slope to the area under the curve, but still not nearly sine approximation.
Saw that. If you compare it side by side with the Hobbywing official video there is a world of difference in the smoothness.
It's in a rig in this vid
https://youtu.be/0IMZCzZC8vs
EDIT....
Warning he gets a lil hot N heavy at the end ! Lol
It looks as smooth as any other brushless system I've driven.
That's why actual side-by-side comparison reports are going to be so important - it's all fine and dandy if it crawls at a snail's pace with a certain amount of control...
But how is it throughout the entire rpm range?
Is there a reason that it's being advertised so much paired with relatively low-kv motors, when it won't take more than 3S?
Some listings do now show a 3300kv, but I am very interested in more hands-on driving information when there's no rep handing someone the controls of a "mystery" rig.
Knowing how it's geared and then how well it runs at a slow crawl, then handles bursts of power to get out of a stuck situation, and finally some throttle-pegged results.
(rubs hands together in anticipation...)
This thread might as well be written in Klingon by now, i feel lost among supreme beings...
Sent from my Nexus 6 using Tapatalk