TURTLE
Gettin’ back on the horse
If you want to meet up this week I will help you fix this, bring some tools."thumbsup"
that would be great. when and where?If you want to meet up this week I will help you fix this, bring some tools."thumbsup"
ya know Ty I ownder if the underdrive at the rear axle is causing a drag issue
I have seen quite a few people run the overdrive front gears and leave the rear gears the stock ratio and they don't have any problems, its kind of the same as some people running say a 55t front and a 65t rear on a clod super as it would help in climbing situations and act like a fulltime dig but it is only a slight amount.
theres huge difference in running an moa electrically (different motors front and rear) and a shafty/single motor with different gearing front and rear,,all the strain is on the single motor
the amp draw on a single output moa with dual motors is split between the motors ,,more volts and amps you throw at the moa the more power it has,,,with a shafty though if you have binding or too much drag on the from or rear of the rig it effects the single motor either way cuz the problem is transferred through the final drive gear through the tranny to the motor.
Everybody has been giving great advice on this. But I think one more thing could be looked at.
I'm currently running an FXR, CC Bec, 3s lipo, 35t tekin motor, and at first the motor was getting hotter than usual and the fxr's temp indicator would be maxed out. It was then pointed out to me that I was using the fxr's internal bec and my ccbec at the same time and this was causing the two to work against eachother which made my fxr overheat, which started cutting power to the motor creating more strain on it to work harder with less amperage beeing supplied and caused my motor to run hotter. So my motor would stall easier and so would my servos.
To make a long story short I removed the red wire from the esc plug that goes to the reciever eliminating the use of the fxr's bec and relying soley on the ccbec. My motor runs cooler and so does my fxr and now I can crawl for an hour+ without any issues.
This might not be your case but if your red wire is still hooked up I would highly recomend trying this out. Its simple, fast, and reversible if it doesn't work. Hope this helps.
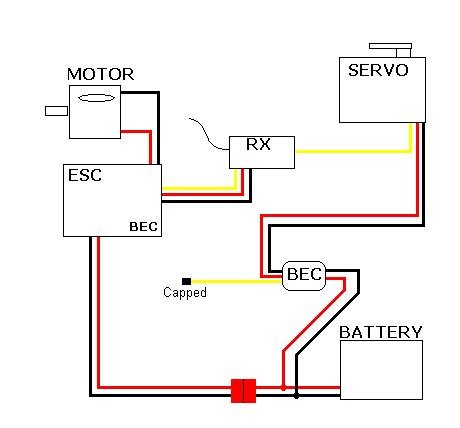
this is how i run mbec in my system...
I just went back and read the first post and noticed that you said the rear is underdriven, didn't notice that the first time. If the front and rear are running at different ratios then they have to fight each and would put a lot of stress on the motor, it would be like driving with the brakes on. And if you tried to push the truck across the floor with no motor you would feel it.
example: say you have,
motor output @8000rpm, this number is from the novak site for a 55t, the rest of the numbers i just pick as close to what i could remember
Main trans; 12t pinion > 96t spur= 8:1 ratio
front axle; 16t pinion > 32t ring= 2:1 ratio, final ratio= 16:1, rpm @ wheel=500
rear axle 1 tooth lower; 15t pinion > 33t ring= 2.2:1 ratio, final= 17.6:1, rpm= 454.54
rear axle 2 teeth lower; 14t pinion> 34t ring= 2.42, final= 19.42, rpm= 411.94
so say we have a 13" rollout (which I'm sure is short), we would have
front= about 6.15 mph
rear 1 tooth= 5.59 mph
rear 2 teeth= 5.07 mph
Hope this helps to show why it would cause a prob even with a difference of one or two teeth it would cause the axles to fight each other.
Your thinking to much. These are RC trucks not 1:1 rigs. The ratio on the underdrive gear set is not near enough to make the axle bind and overheat the motor.
Ok heres my 2 cents. Run your BEC like Castle says to or run it directly to the steering servo. You will have to pull the signal wire to run it to your reciever unless you are running a Y harness which you are. I would say you are good on the BEC. If you cap was bad on the FXR you would be scrapping melted plastic off of your truck by now. Your battery is fine its not putting out more power than the motor can handle.
Seems to me like everything electronic wise is fine from what your say. You also say that the drivetrain is not binding. If the shafts spin free your axles are good. If you spur spins free your trans is fine. Everything is leaning towards your motor. Its junk. You have tried brushes,springs, cleaning the comm now your just chasing ghost. I'd say the motor gave up the ghost around the time the cap broke. Must have got a surge of juice and cooked one of the windings. Get a buddys motor and try it to see what happens. I have seen Integys give up the ghost for no reason before.